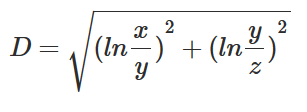
In a recent post we discussed the Flinn-Diagram. There it was possible to see that – depending on the orientation of the regional stress field – a rock can be deformed in several ways, but the deformation of a rock unit is of course not visible in a small outcrop. Therefor, we have to look at specific textures in smaller scales. Let’s think about it: in our example we deformed a cube. What would be ideal to use in real-life then? Easy, a mineral or geologic object with either a cubic or even better (better for the strain ellipsoid) a sphere-like appearance.
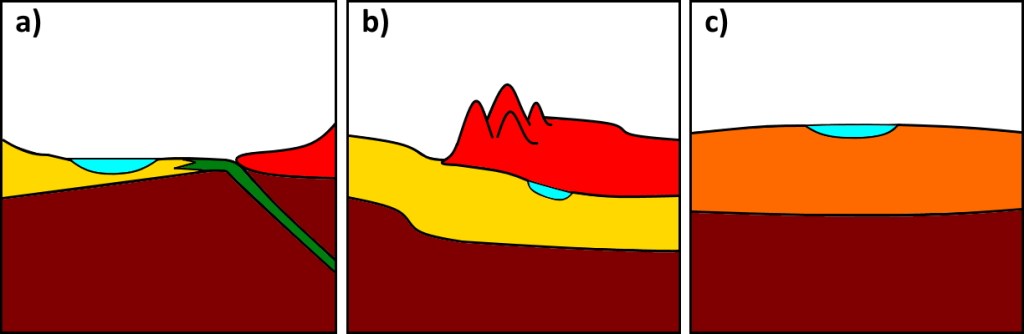
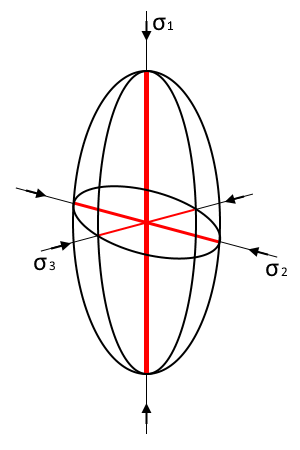
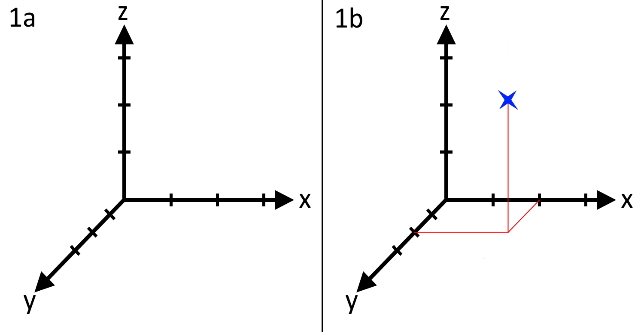
So, don’t let us waste any more time and begin. Imagine that we have a “raisin-cake” rock, meaning a rock with spheroid geological objects in them. What are these? Let’s just say that these are Ooids, small spheres of limestone. Another often proposed candidate is gas bubbles in volcanic rock, but I still have to see gas bubbles that did not show any deformation whatsoever. Anyway; a rock with some ooids and a mudstone-matrix gets formed in a shallow ocean environment (aka. Laguna; Fig. 1a). Later in time a subduction developed up to the point that the ooid-stone and other adjacent continental rocks get to the subduction zone, so that a thrust zone develops (Fig. 1b). Now some orogenesis occurs and our rock unit gets buried. Later the overlying rock units will be eroded, and our rock will be exposed at the surface again (Fig. 1c). Due to the local stress regime, our ooids will now be deformed, but how?
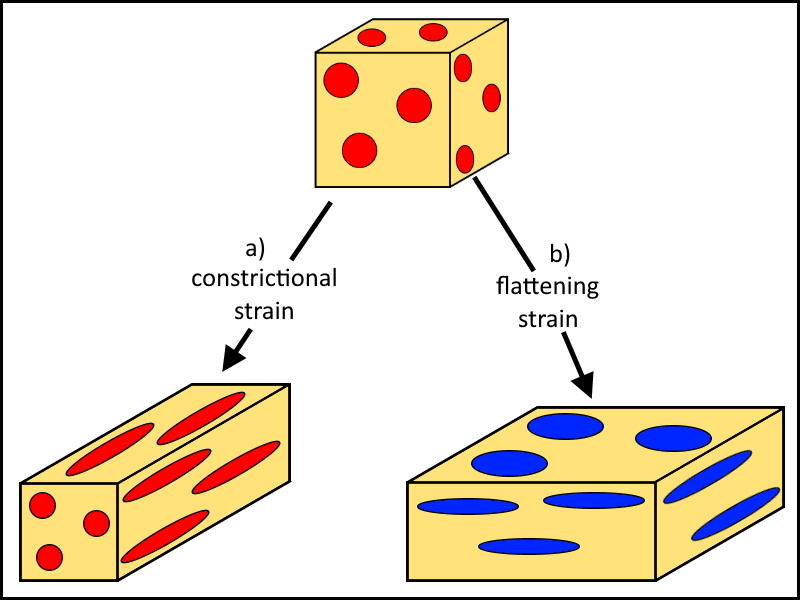
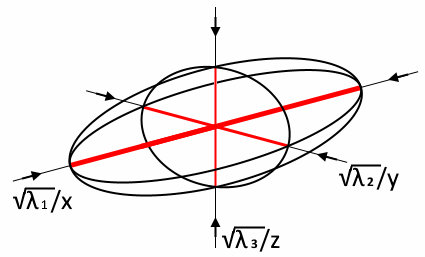
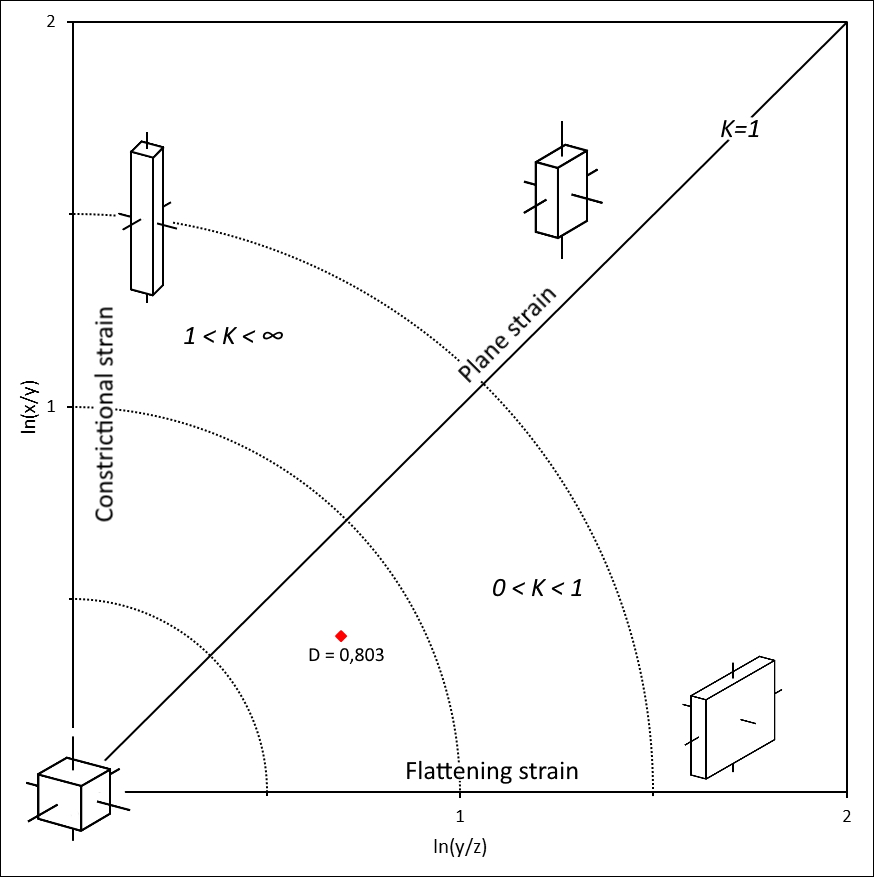
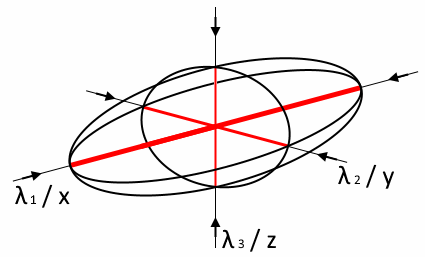
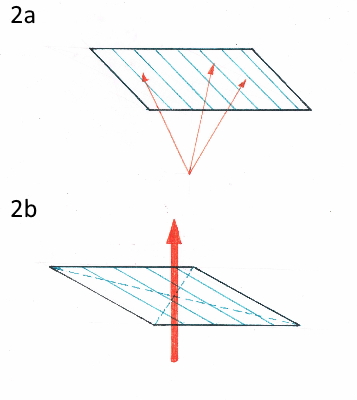
Let’s recap: Our strain model is basically bimodal with constrictional strain as one end member and flattening strain as another end member.
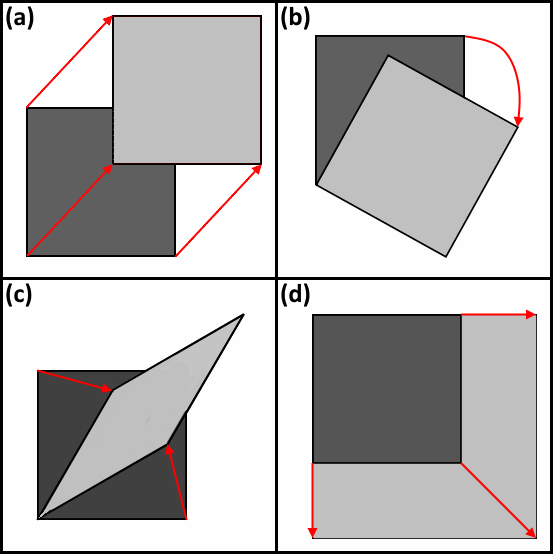
Therefore, if only constrictional strain is applied to our rock, our round ooids will deform to long cigars (Fig. 2a). If only flattening strain is applied to our rock, then we will get discus-like (or pancake-like) ooids (Fig. 2b). If you speak Polish, Czech, German or French there is a little trick here. Do you remember how we call stress ellipsoids if they appear flattened? Right, oblate ellipsoid. Now, how are these famous edible disks from Karlovy Vary called in the Czech language? Oplatka, correct! See, now you possibly know a new word and have a little trick to remind the shape of flattened geological objects.
Back to our topic at hand. Now as we have applied our two extreme cases to our example, we can think of what would happen in an intermediary situation? Easy, right? Our ooids would both be flattened and elongated in one direction. However, this is all nice and good, but what do we do if we are in higher metamorphic conditions and the only stuff that we can see is gneiss? Well, for that we must introduce the terms lineation and foliation. Lineation (lineation –> linear –> line) describes whether or not minerals with one elongated axis are aligned in one direction. In the case of our ooids this means that if e.g. the longest axis of them is always oriented in N-S direction in the outcrop, our lineation is well developed and shows a N-S direction. Foliation (also called: schistosity) on the other hand (foliation –> foil –> planar object) means that objects show a good separation along parallel planes. Meaning: if you stack pancakes upon each other, they show perfect vertical foliation.
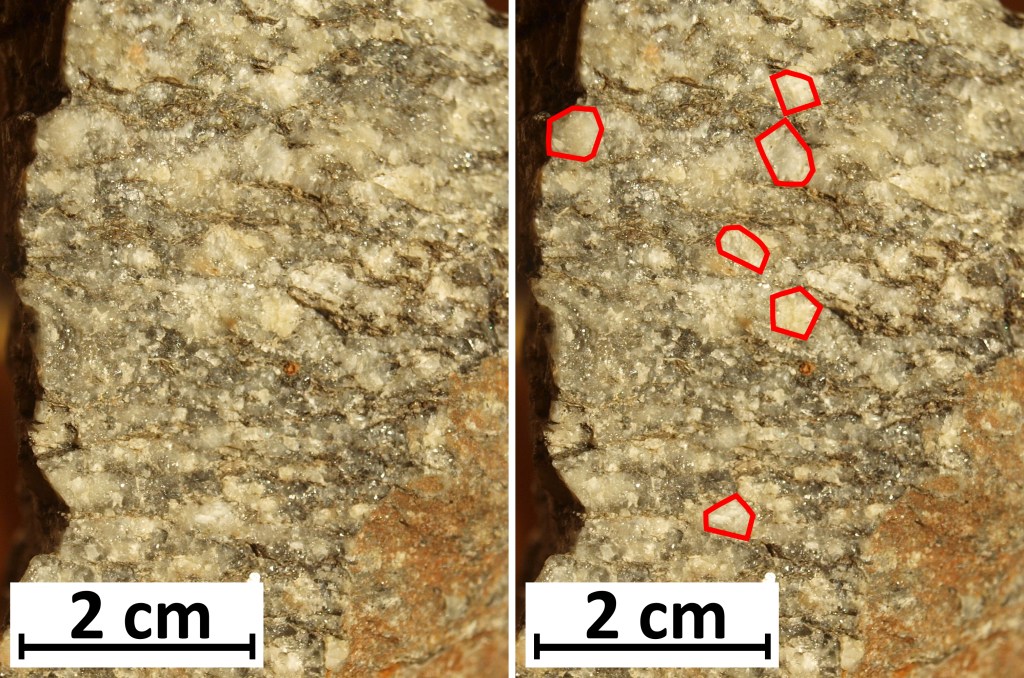
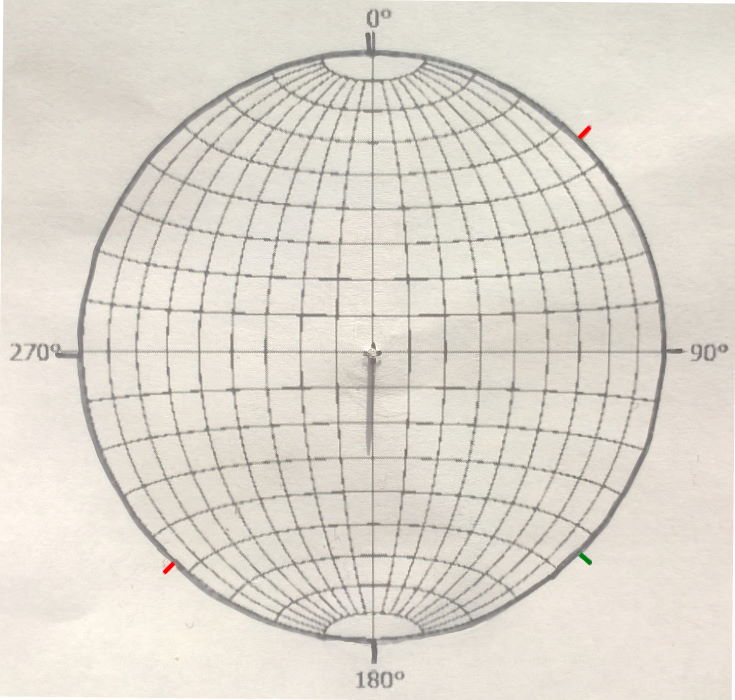
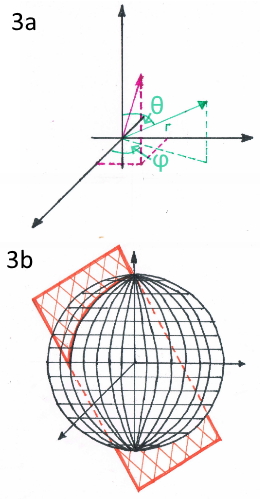
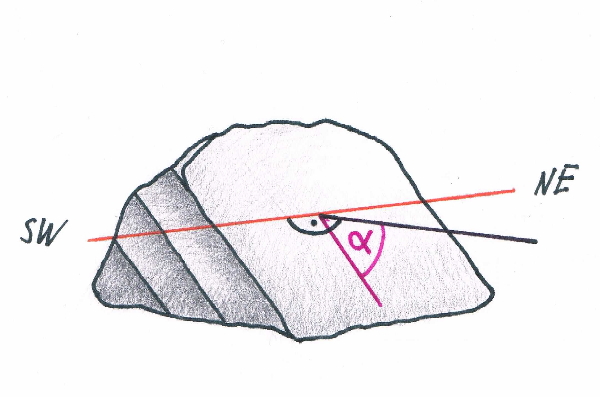
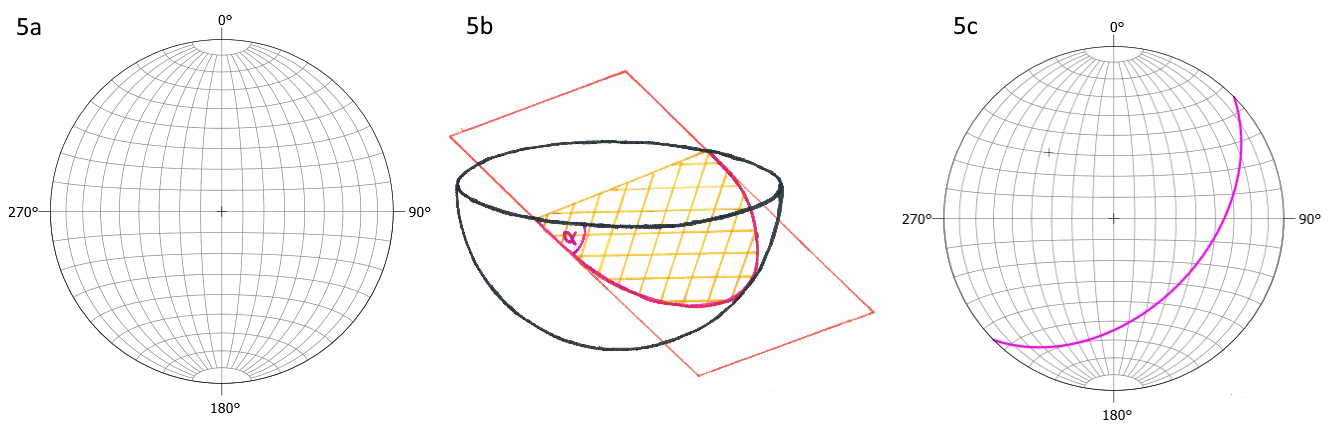
So, let’s apply this to a real-life rock, shall we? Let’s take a gneiss as an example. Assume that a sample of Freiberger gneiss shows a planar fabric of the mica minerals with a nearly horizontal orientation in the outcrop (Fig. 3).
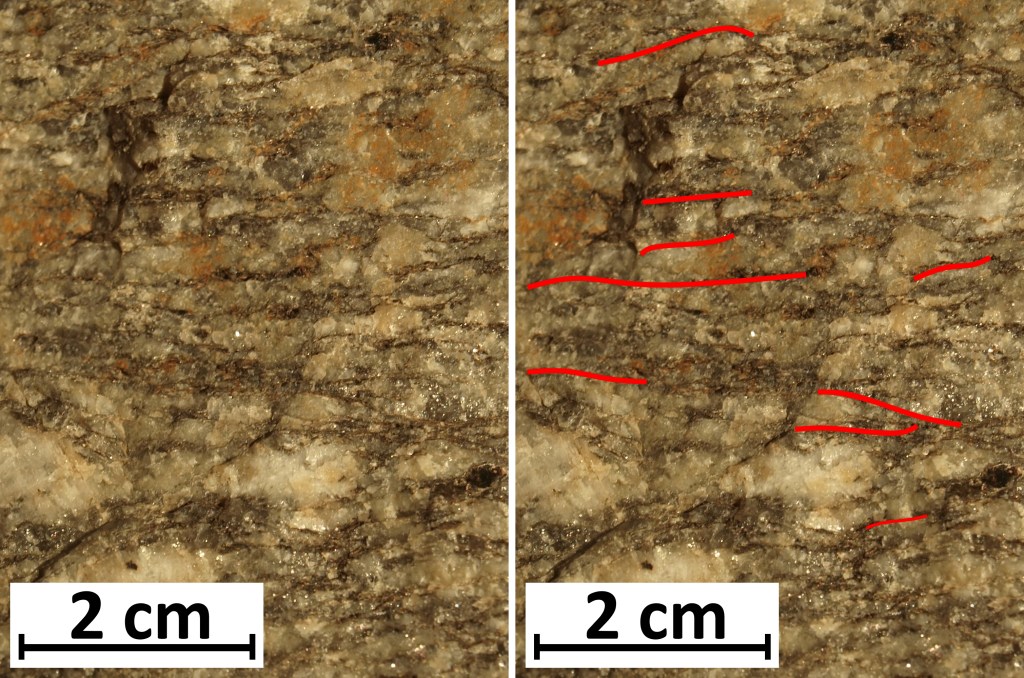
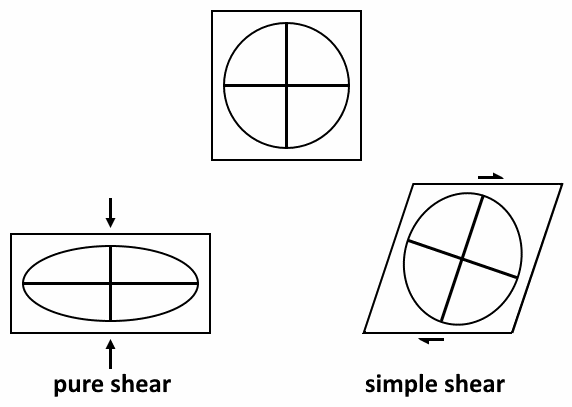
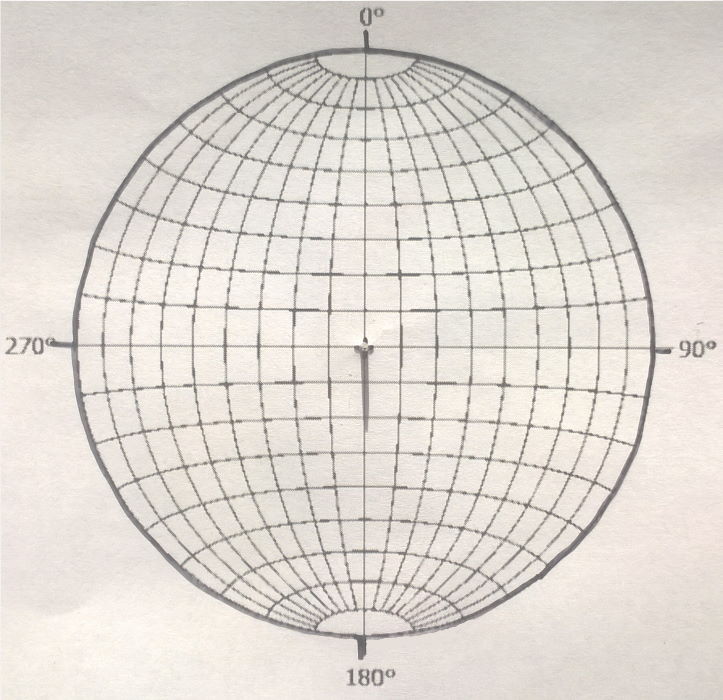
This is our pure shear component. In addition to that, our grains itself are all oriented in one direction, as can be seen on the “top” of the sample. Now we rotate our sample (meaning we hammer rocks away in our outcrop until we get what we want) to the face of the rock, that the elongated minerals are pointing to. Assume that in our sample the minerals are all oriented in NW-SE orientation. This is our lineation (Fig. 4).
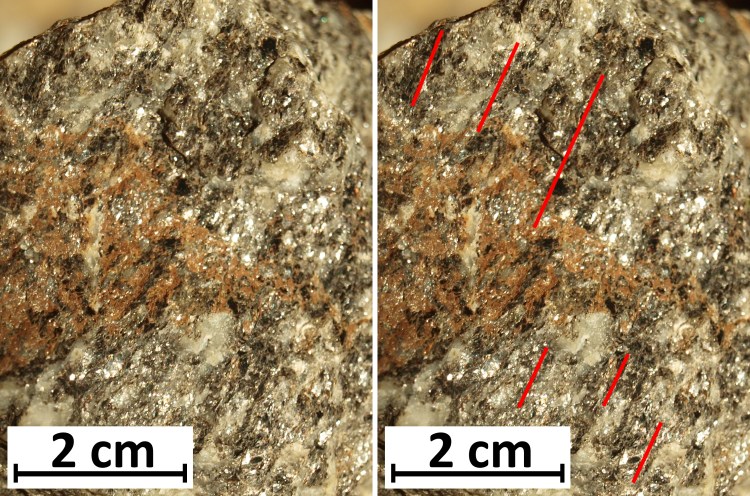
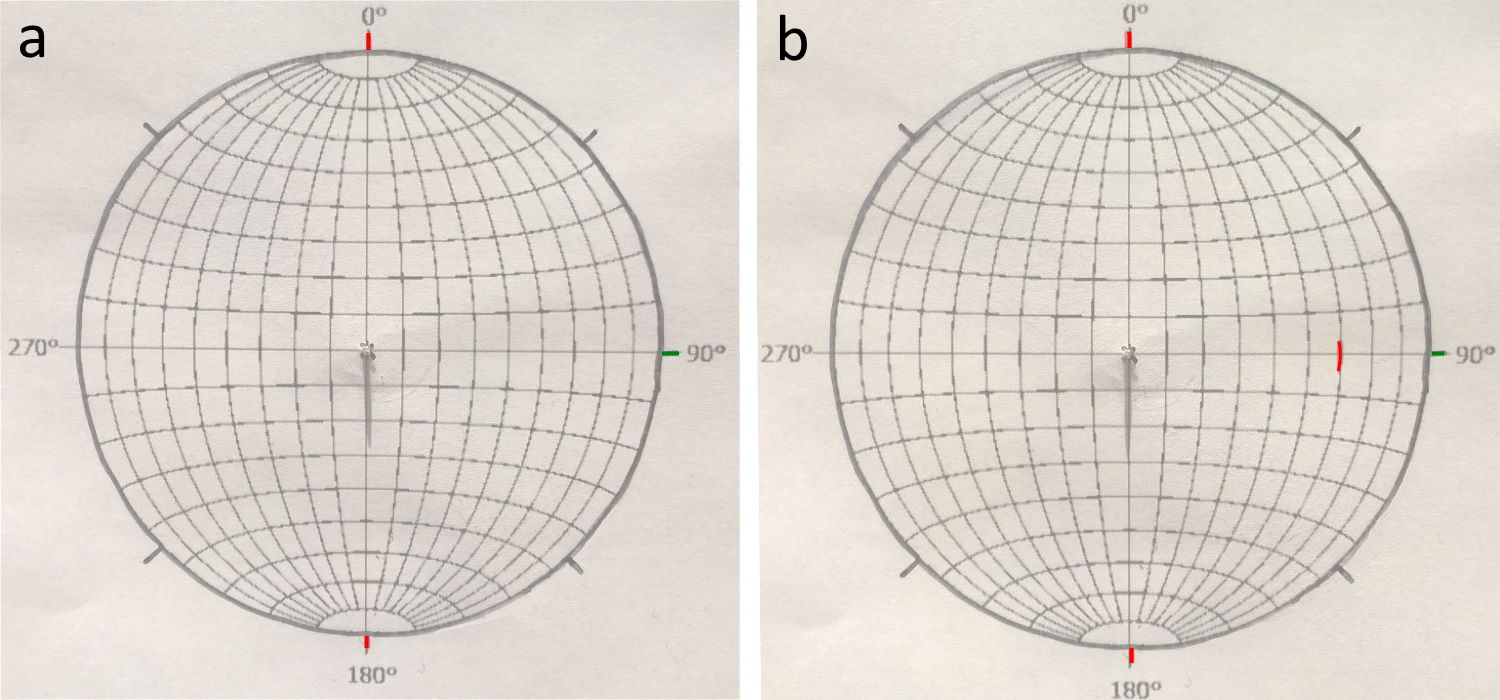
So, we only need to find (or hammer away rock) a surface with the strike values 45°-125° and a dip of 0° and look at this: our minerals appear nearly square-like (of course not completely square). This is our simple shear component.
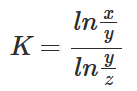
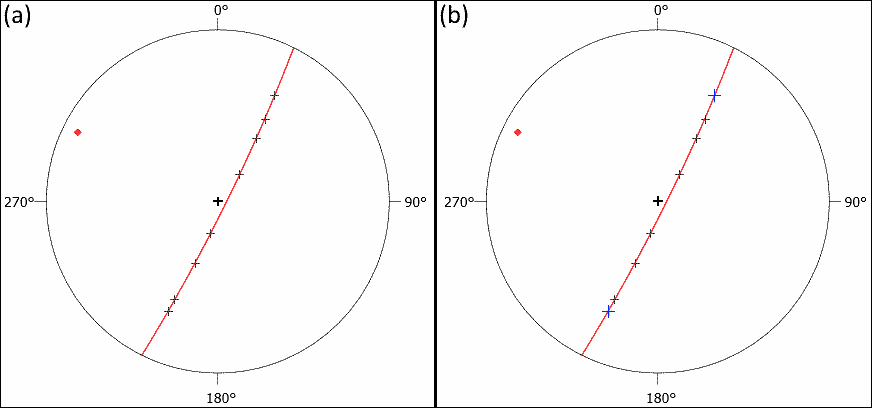
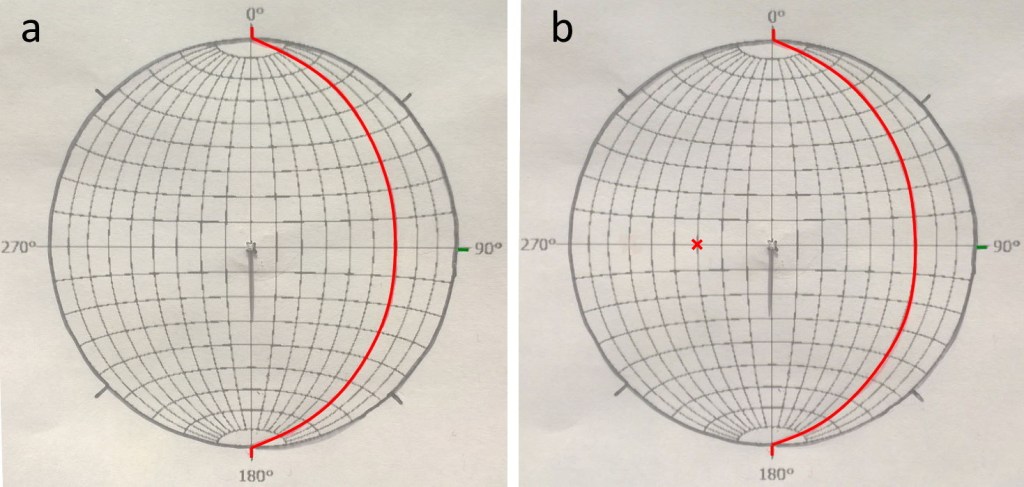
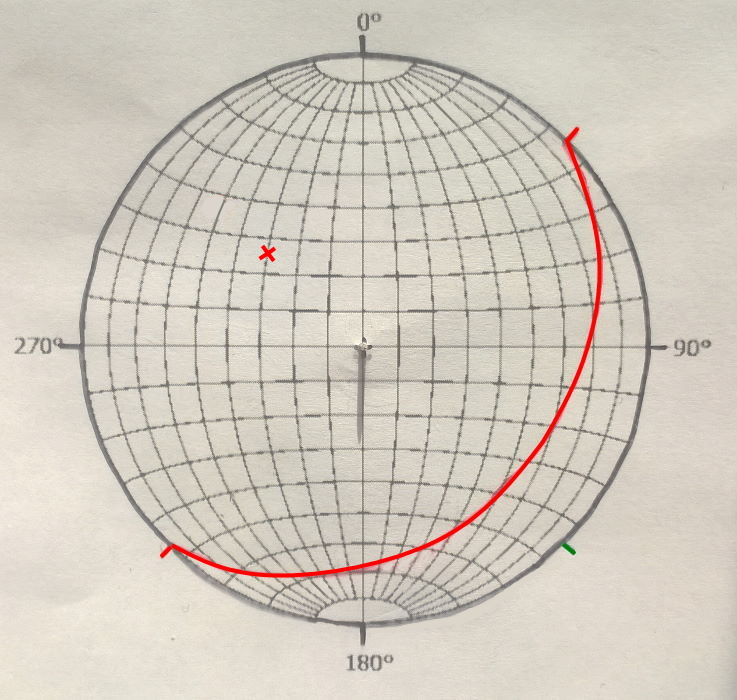
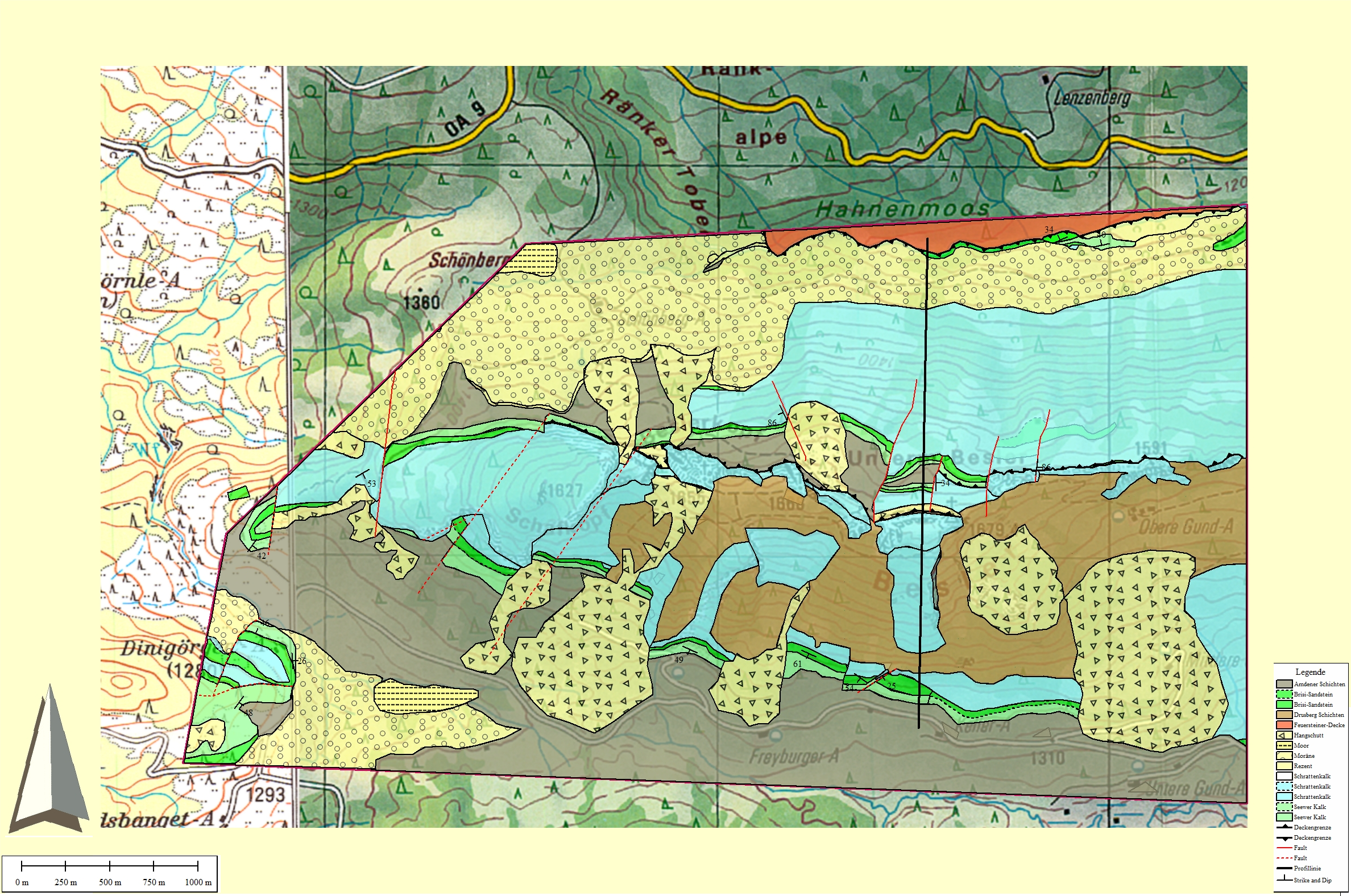
What we now cannot really determine from this data alone is whether our flattening strain dominated over our constrictional strain or vice versa. We could determine that if we were able to find e.g. deformed garnets in our sample where we could measure the different axis and place the value in the Flynn-Diagram accordingly. Now we look at a map of Europe (Fig. 6) and what do we see there? Our sample lies in the zone of the variscan metamorphic zone with several thrust zones that strike roughly from NE to SW.
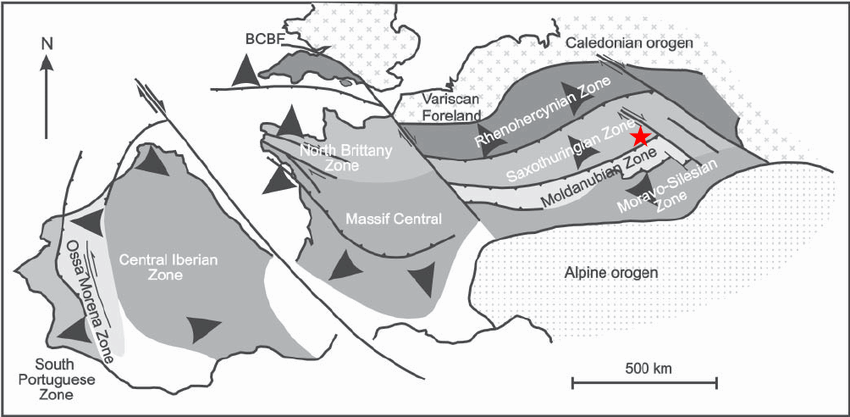
Does this fit with our observations? Indeed, it does! The overlaying rock provided simple shear, while the constrictional SE-NW oriented stress regime provided simple shear. If you are further interested in this topic, I highly advise you to look at this instagram post of Prof. John Encarnacion.
Source
Leveridge, B. & Hartley, A (2006). The Variscan Orogeny: the development and deformation of Devonian/Carboniferous basins in SW England and South Wales The Variscan of SW England. In: The Geology of England and Wales.



{kind=link}